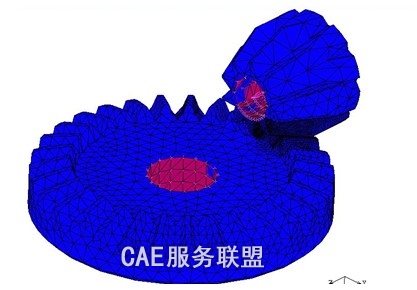
利用大型有限元分析软件建立了某齿轮副多齿对啮合的三维有限元非线性接触分析模型。在一个啮合周期内,对齿轮副进行了在一定转矩和转速下的动态啮合仿真分析,给出了动态啮合时轮齿的接触状态、接触应力、齿根弯曲应力及主从动齿轮的转矩、转速和加速度随啮合位置变化的规律。